More is better! Mendel90
Nov 18, 2016 · 3d printing
Every self respecting 3D printing guy has to have built his own 3d printer. By buying a kit from china I felt like that was cheating. So after looking at some printer designs I decided to go with the Medel90 by Nophead. Since it is fully customizable and can be built with simple tools and someMDF board.
So I went to the hardware store to get a piece of MDF 12mm thick and a bunch of screws, some smooth rod, threaded rod, nuts and bolts. Once at home I fired up my 3d printer to print the needed parts starting with the frame blocks. To cut and drill the plates I printed the design on multiple A4 using Adobe Acrobat reader in poster mode.


Next I started on the axis, again I needed printed parts and I cut the rods to length and started mounting the Y-axis. Slowly I started to realize I needed motors to make this thing do anything at all and luckily our primary source of cheap stuff did not let me down. I bought 5 nema 17 stepper motors from a German warehouse with a torque of 6 kgcm for only €56,- and the best thing was they arrived that same week!


Now for attaching the threaded rods to the z-axis motors I needed couplers, which I did not have at hand and since ordering them from china takes 3 weeks I decided to make my own. It was a good way to test my new mini lathe :D

Thanks to my father in law I now have a simple tapping set as well, which I used to tap the holes with.


The next problem I faced was that I did not have any enstops that fitted the design, I did however have some optical endstops laying around so I used 1 of those.
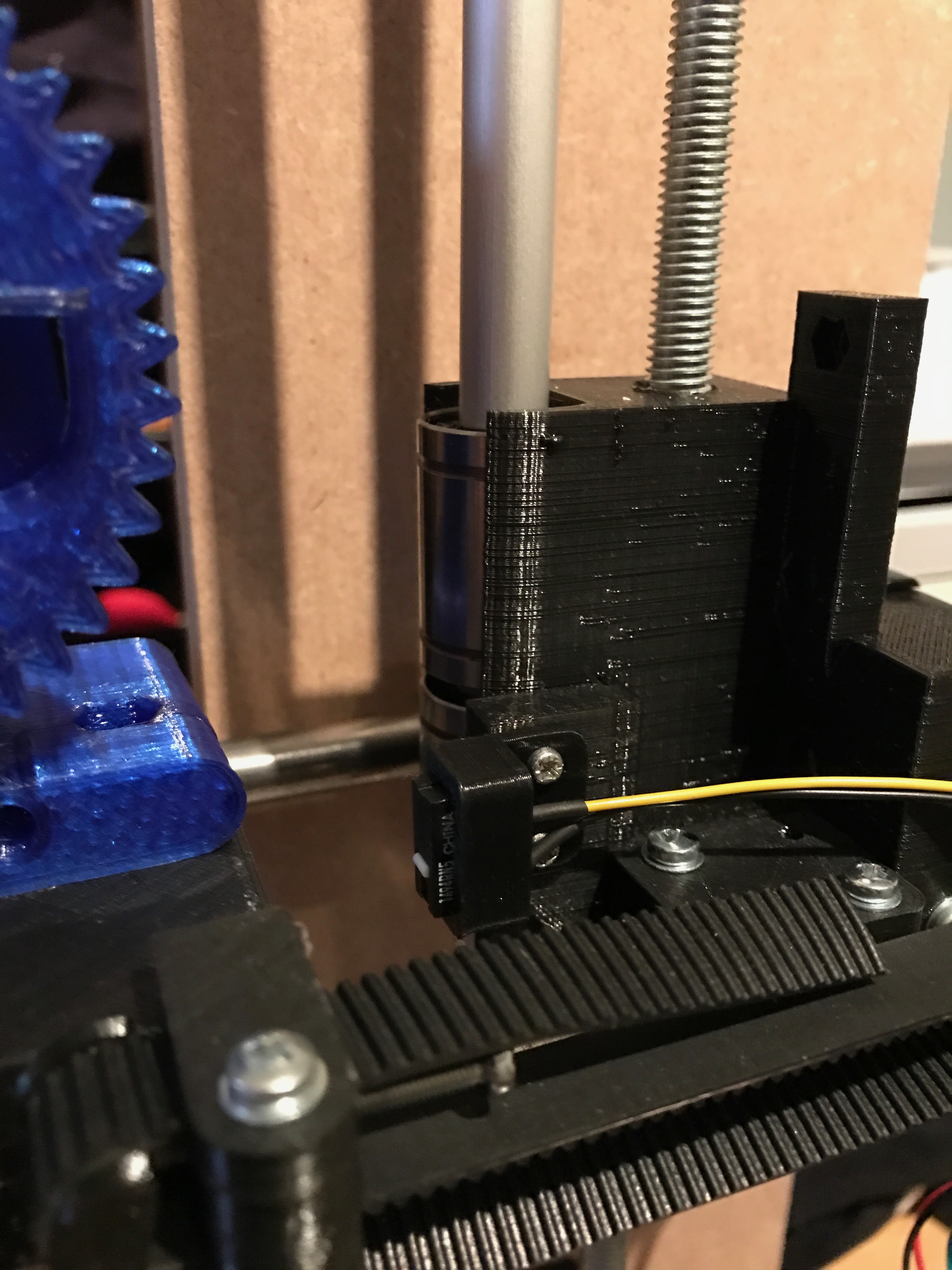
Be careful when connecting them though my melzy board for some reason supplies 12V to the endstop V+ pins and I fried one endstop by hooking it up to that. So after a bit of pcb trace cutting and a bodge wire 5V was where it is supposed to be and….. I decided to only use 1 optical endstop :D because I found some tactile witches on an old mouse which where a bit smaller but by printing an adapter they fit on the original design like a glove.
After adding some wires I could finally test if the thing moves at all and what do you know it works and even homes! So thats is my progress up to now, I still have some work to do with the hotend and cleaning up the wiring but I hope to post a first print soon!

